transformations.markdown 3.1 KB
Transformations {#tutorial_transformations}
@prev_tutorial{tutorial_widget_pose} @next_tutorial{tutorial_creating_widgets}
Goal
In this tutorial you will learn how to
- How to use makeTransformToGlobal to compute pose
- How to use makeCameraPose and Viz3d::setViewerPose
- How to visualize camera position by axes and by viewing frustum
Code
You can download the code from here . @include viz/samples/transformations.cpp
Explanation
Here is the general structure of the program:
- Create a visualization window. @code{.cpp} /// Create a window viz::Viz3d myWindow("Transformations"); @endcode
Get camera pose from camera position, camera focal point and y direction. @code{.cpp} /// Let's assume camera has the following properties Point3f cam_pos(3.0f,3.0f,3.0f), cam_focal_point(3.0f,3.0f,2.0f), cam_y_dir(-1.0f,0.0f,0.0f);
/// We can get the pose of the cam using makeCameraPose Affine3f cam_pose = viz::makeCameraPose(cam_pos, cam_focal_point, cam_y_dir); @endcode
Obtain transform matrix knowing the axes of camera coordinate system. @code{.cpp} /// We can get the transformation matrix from camera coordinate system to global using /// - makeTransformToGlobal. We need the axes of the camera Affine3f transform = viz::makeTransformToGlobal(Vec3f(0.0f,-1.0f,0.0f), Vec3f(-1.0f,0.0f,0.0f), Vec3f(0.0f,0.0f,-1.0f), cam_pos); @endcode
Create a cloud widget from bunny.ply file @code{.cpp} /// Create a cloud widget. Mat bunny_cloud = cvcloud_load(); viz::WCloud cloud_widget(bunny_cloud, viz::Color::green()); @endcode
Given the pose in camera coordinate system, estimate the global pose. @code{.cpp} /// Pose of the widget in camera frame Affine3f cloud_pose = Affine3f().translate(Vec3f(0.0f,0.0f,3.0f)); /// Pose of the widget in global frame Affine3f cloud_pose_global = transform * cloud_pose; @endcode
If the view point is set to be global, visualize camera coordinate frame and viewing frustum. @code{.cpp} /// Visualize camera frame if (!camera_pov) {
viz::WCameraPosition cpw(0.5); // Coordinate axes viz::WCameraPosition cpw_frustum(Vec2f(0.889484, 0.523599)); // Camera frustum myWindow.showWidget("CPW", cpw, cam_pose); myWindow.showWidget("CPW_FRUSTUM", cpw_frustum, cam_pose);} @endcode
Visualize the cloud widget with the estimated global pose @code{.cpp} /// Visualize widget myWindow.showWidget("bunny", cloud_widget, cloud_pose_global); @endcode
If the view point is set to be camera's, set viewer pose to cam_pose. @code{.cpp} /// Set the viewer pose to that of camera if (camera_pov)
myWindow.setViewerPose(cam_pose);
Results
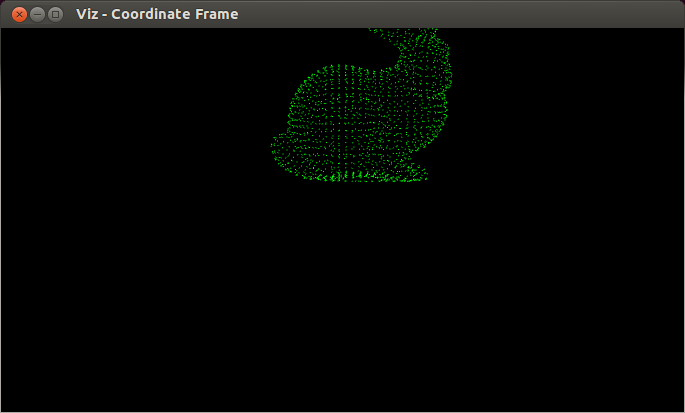
-# Here is the result from the camera point of view.
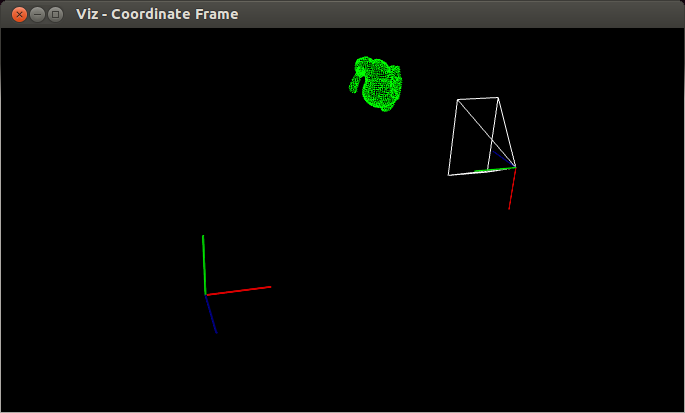
-# Here is the result from global point of view.